项目简介
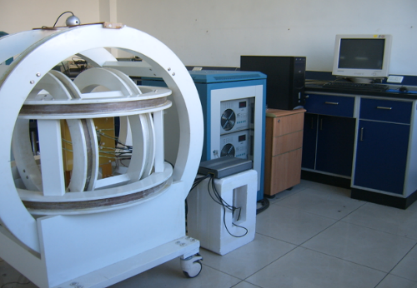
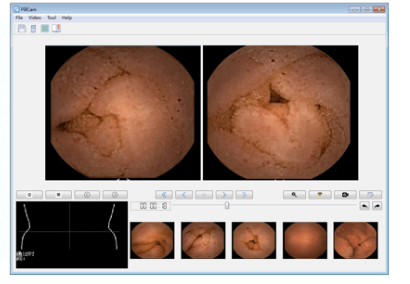
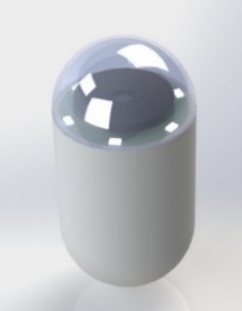
针对现有胶囊内窥镜漏检率较高的问题及临床对体内诊疗装备急需,本项目提出了一种新型多场驱动的应用于体内消化道诊疗微机器人系统,该系统具有无线图像采集与传输的功能,突破了对体内设备进行运动控制的关键技术,可以由医生操纵控制系统实现机器人在人体消化道中的前进、停留甚至后退,可望完成药物的定点释放及活体组织采样。预期研究成果将应用在消化道疾病筛查及精准诊断与治疗方面,必将对消化道医学产生重大影响。针对现有胶囊内窥镜主要依靠胃肠道自然蠕动行进使得胶囊容易错过病灶部位的问题,我们研制了主动型胶囊内窥镜系统,一方面,医生可操纵位于体外的控制系统,使胶囊在病变部位前后移动对病变部位进行精确的检查,提高病症确诊和检出率;另一方面,该系统可以实现胶囊内窥镜的实时跟踪,能对病灶进行自动识别和精准定位。同时也可以解决目前非常棘手的胶囊嵌顿问题。 目前国际上也只有安翰光电技术有限公司的磁控胶囊胃镜具有控制功能。而我们研制的主动型胶囊内窥镜系统,很早就得到了国家863项目和国家自然科学基金项目的支持,现在已将完成实验室样机,见图1~3,拥有多项发明专利。相对于安翰公司的磁控胶囊胃镜(只能用于胃部检查),我们提出的胶囊内镜可以用于胃、肠道,且具备更好的操控精度、灵活性及安全性。未来可作为体内的医学诊疗平台,前景非常广阔。
应用领域
目前我国消化道疾病发病率较高,主动型胶囊内窥镜应用市场潜力巨大,预计相关产品市场年价值可达上亿元。本项目拟建立研发和中试实验室,包括胶囊磁控系统、主动胶囊、定位系统、图像处理系统的研发。预计3年获取CFDA认证形成产品,后逐步进行量产。未来完成药物的定点释放及活体组织采样。本项目提出的主动型胶囊内窥镜系统的主要应用于胃肠炎症、消化道疾病的诊治。消化系统疾病,如胃肠炎症、消化道肿瘤等是我国的常见病、多发病,也是严重危害人类健康的全球性疾病。本项目提出的多场驱动的主动型体内诊疗机器人克服了传统的插入式内窥镜的缺点,无创无痛,解决的是当前胶囊内窥镜不能实现主动控制或者缺乏灵活性的问题,并期望能实现药物定点释放、活组织采样功能,应用市场广阔。
相关图片